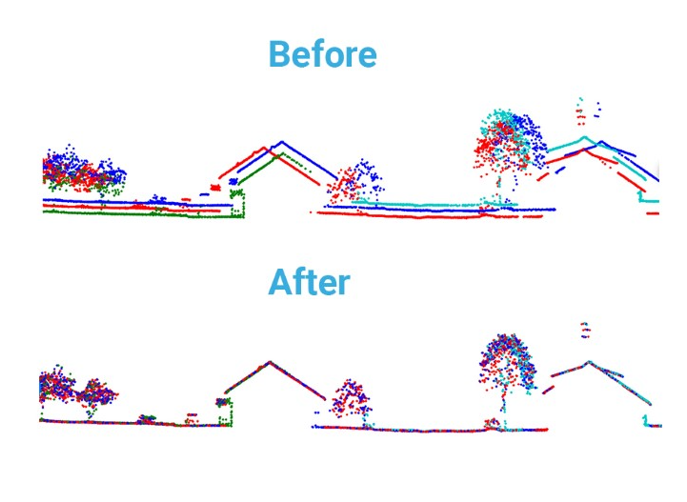
GNSS errors, which are inevitable, cause point clouds from different passes to be misaligned. In most cases, these misalignments don’t meet the accuracy requirements and because of that, point cloud registration is necessary.
Point cloud registration is the process of aligning two or more overlapping point clouds into one. Two different types of the registration are common: run-to-run registration and registration to control points.
Run-to-run registration is the alignment process without control points being included. This means that the final position of the point clouds is determined by their accuracy, meaning that the point clouds with better accuracy have the advantage and are being considered as the reference ones.
Registration to control points is the process which includes control points as the reference for the alignment. Control points are usually predefined markers or some features from the real world that can be unambiguously identified in the point cloud. Most common are road markings.
In both types of registration, final result is the single point cloud according to the accuracy requirements of the project.