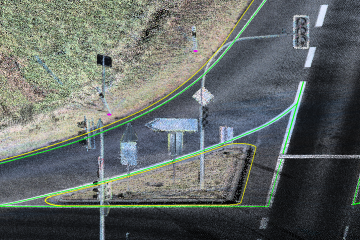
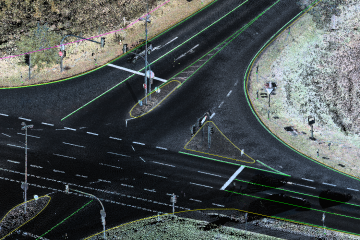
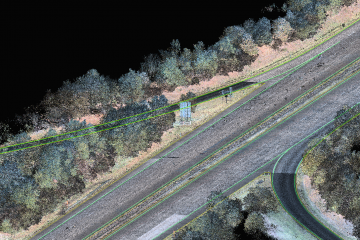
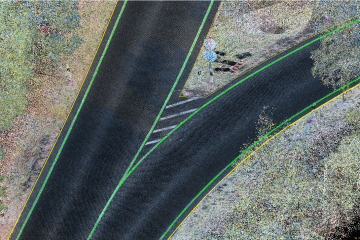
The matching of point cloud and photographs



In the world of geospatial technology and innovation, INTERGEO stands out as one of the most prominent and influential events, attracting professionals and experts from all corners of the globe. For the second year in a row, we had the privilege of being a part of this incredible gathering, which took place in Berlin.

LiDAR (Light Detection and Ranging) is one of the most popular ways to remotely sense the Earth. LiDAR system uses laser rays that are pointed toward the ground and then reflect to the sensor, making 3D models of the terrain and the objects on it. Mobile mapping expert Jovana Babić will explain in a bit more in detail how LiDAR works, as well as the applications of the LIDAR system.
A Brief History of Geodesy Technology advancements in the last 50 years allowed mankind of today to do majority of its work by “the push of a button”. Modern society with a little to no Read more…